|
.
 |
Généralité |
Le Bus EIB (European Installation Bus) était un standard
européen, normalisé ISO (International Standardisation
Organisation). Il a été créé en 1987, par quelques constructeurs
européens d'appareils électriques. C'est un système ouvert (non
propriétaire); c'est-à-dire que le système n'est pas dépendant d'un
fournisseur, on peut sans problème utiliser des appareils de marques
différentes dans une seule installation. Il utilisé par plus d'une
centaine de fabricants, sur des milliers de produits. En 1999 cette
association crée de l'association Konnex (KNX) qui devient
l'appellation "normale".
Ce système, contrairement aux automates programmables qui ont une
"intelligence" centralisée dans un seul module ou éventuellement
répartie sur plusieurs modules déportés, est basé sur une
"intelligence répartie".
Chaque point communiquant connecté au bus dispose de son propre
microprocesseur qui gère la communication sur le réseau et qui est
capable d'émettre ou de recevoir des messages. Le prix de chaque
composant est donc relativement élevé. |
|
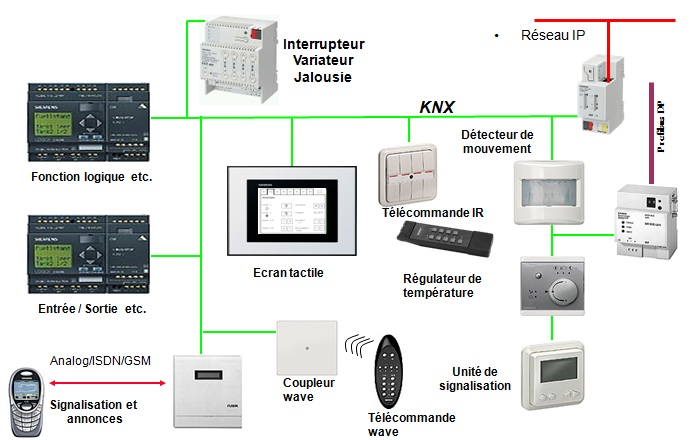
le bus KNX |
|
La communication entre les différents appareils raccordés se fait en
général pas une liaison à 2 fils appelée ligne pilote séparée. (PL
: power line)
Il est cependant possible de communiquer soir
-
par une paire torsadée (TP
: Twisted Pair)
-
par courant porteur (les signaux transitent par le réseau 230 V)
-
par radio fréquence (RF
: Radio Frequency)
-
par infrarouge (IR :
InfraRed)
-
Ethernet (KNX sur IP)
Le circuit de puissance est alimenté en 230 V ou 400 V / 50 Hz.
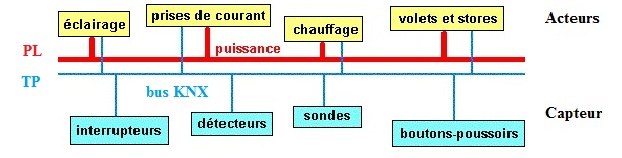
Le circuit de puissance n'alimente que les
acteurs (récepteur : éclairage, prises, chauffage, etc..)
Le bus KNX relie les différents capteurs
(donneurs d'ordre : interrupteurs, poussoirs, détecteurs, etc…),
C'est en général un câble 2*2* 0,8 mm dont seuls 2 fils sont
utilisés.
Le bus KNX
est alimenté avec une tension continue de 29V. La
plupart des composants soutirent directement au bus, l'énergie
nécessaire à leur fonctionnement. La limite inférieure de la tension
d'alimentation est de 21V DC. Il ne faut jamais boucler (liaison
entre deux lignes) des bus KNX. Les autres topologies (étoile, bus,
arborescente) peuvent être utilisées et mélangée.
La consommation d'un composant
KNX
est normalisée à
10 mA. Il existe des fabricants qui propose du
matériel qui ne consomme que 5 mA. Dans ce cas, lors de la
planification, il est nécessaire de dimensionner l'alimentation
comme si ces appareils consommaient 10 mA afin de ne pas avoir
de surcharge de la source lors d'un éventuel échange de ce
matériel par du matériel à consommation standard.
|
|
les symboles KNX |
Pour désigner les différents
éléments raccordés sur un bus KNX, on utilise des symboles dont
voici quelques exemples:
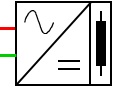 |
Alimentation de bus:
alimentation par le réseau 230 V
AC et transformation en 29 V DC
On peut mettre au maximum deux alimentation par ligne
distante au maximum de 200 m l'une de l'autre |
 |
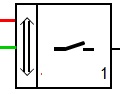
Capteur analogique (dimer) ou tout-ou-rien (interrupteur)
alimentation que par le bus KNX.
dans cet exemple commande par poussoir |
 |
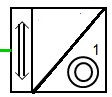
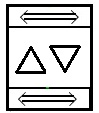
Acteur
alimentation par le bus pour recevoir les ordres et par le
réseau 230 V AC pour alimenter le récepteur souvent dessiner
sur la droite |
 |
Coupleur de ligne / coupleur de zone
Sert à augmenter le nombre de ligne |
On désigne souvent les
acteurs et les capteurs sous la désignation PRT (participant au bus)
lorsqu'il n'est pas utile de différencier leur fonction.
|
|
Architecture KNX |
L'architecture
peut être de différentes topologies :
En aucun cas la topologie ne
peut être en anneau. Il ne faut aucune boucle ou
liaison entre des lignes.
Le
Système KNX permet d'avoir des passerelles avec des API ou/et
l'internet. Dans ce site nous n'étudions que le système à bus 2
fils.
|
|
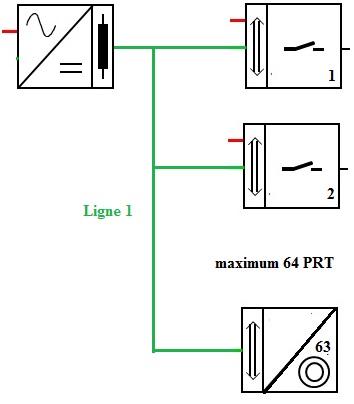
notion de "ligne" KNX |
|
Une ligne est composée
-
d'une alimentation
et
-
de participants (numérotés de 0 à 63)
En principe on choisit des
alimentations 320mA ou 640 mA ce qui correspond à 32 ou 64
participants de 10 mA chacun.
Les participants peuvent être
indifféremment des acteurs ou des capteurs.
La longueur maximum entre
l'alimentation et le participant le plus éloigné est de 350
m
notes : il n'est pas rare de parler également de module à la
place de PRT |
 |
|
|
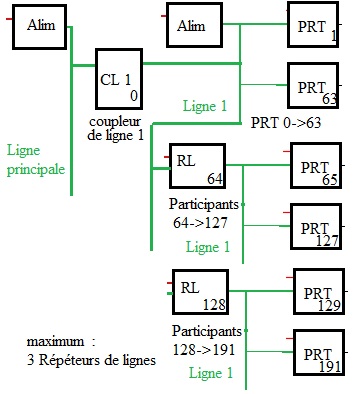
les répéteurs KNX |
|
Il est techniquement possible
d'ajouter des répéteurs afin d'augmenter le nombre de
participant.
On peut ajouter jusqu'à un maximum de
3 répéteur par ligne ce qui porte le nombre de participants
par ligne à
64 + 3* 64 = 256 participants
Toutefois il est préférable de structurer une installation
avec plusieurs lignes et non en installant des répéteurs de
ligne RL |
 |
|
|
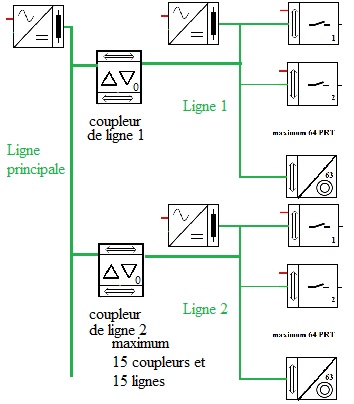
les zones KNX |
|
Pour augmenter le nombre de
participants, il faut créer plusieurs lignes
On peut créer des zones de 15 lignes
au maximum
Le coupleur de ligne portera le
numéro de module 0
le nombre maximum de participant est
donc de
15
* (64-1) = 945 participants
Chaque ligne a sa propre alimentation
Il faut également une alimentation pour la ligne principale |
 |
|
|
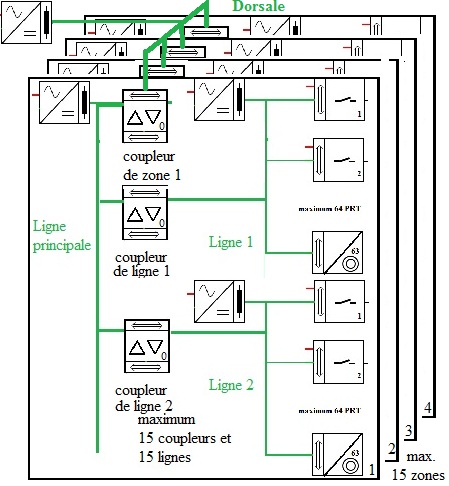
la dorsale KNX |
|
Pour des installations dépassant 945
participants (ou 3780 participants si l'on emploie des
répéteurs de ligne), on peut faire une liaison entre les
zones avec une ligne "dorsale".
Cette liaison peut regrouper 15 zones
au maximum ce qui porte le nombre maximum de participants à
57600.
note : dans ce nombre sont inclus les
coupleurs de zone ( CZ -15), les coupleurs de ligne (CL –
225) et les répéteur de ligne ( RL – 675)
La distance max. entre deux modules
est de 700 m
La longueur max. du bus : 1 km |
 |
|
|
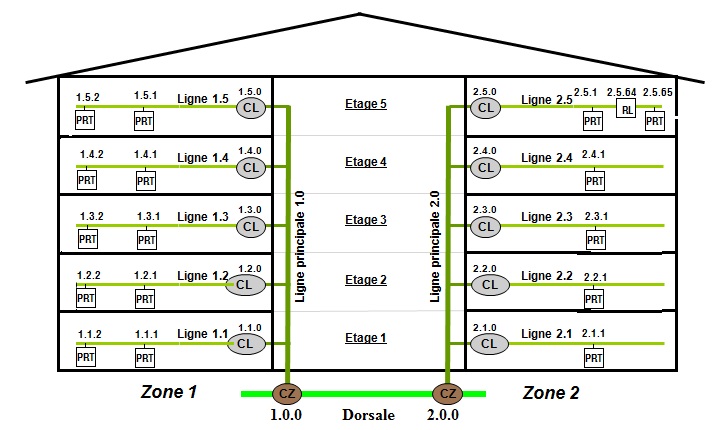
le système d'adressage KNX |
|
Chaque élément connecté au bus
EIB/KNX
est indépendant des autres éléments. Il est capable d'envoyer un
message appelé télégramme
qui sera "entendu" par les autres éléments, mais traité uniquement
par l'acteur concerné.
Chaque module a une adresse dite adresse
physique.
La structure de l'adresse physique comporte 3
numéros séparés par un point :
Z . L . P
·
Z - numéro
de la zone, valeur de 1 à 15. Un coupleur de zone a obligatoirement
une adresse Z.0.0
·
L – numéro
de la ligne, valeur de 1 à 15. Un coupleur de ligne a
obligatoirement une adresse
Z.L.0
note
L=0 est attribué au coupleur de zone
·
P – numéro
du participant, valeur de 1 à 255. Un participant a obligatoirement
une adresse Z.L.P
note
P=0 est attribué au coupleur de ligne
Les répéteurs de ligne ont une adresse physique du même type que les
participants Z.L.P.
L'adressage physique se faisant en binaire, la structure de
l'adresse binaire est :
ZZZZ. LLLL. PPPPPPP
Une lettre représente un bit
à 0 ou à 1. Il faut 4 bits pour numéroter de 0 à 15 et 8 bit pour
numéroter de 0 à 255. Il
faut donc 16 bits pour définir une adresse de module.
Exemple : l'adresse 03.07.011
se code en binaire ainsi :
0011.0111.00001011
|
|
les télégrammes KNX |
Lorsqu'un participant doit communiquer avec un autre participant ou
a un groupe de participants, il le fait en envoyant un télégramme
sur le bus. Le télégramme n'est envoyé que s'il n'y a pas d'autre
activité sur le bus à cet instant, sinon le télégramme est envoyé un
peu plus tard. En cas d'envoi simultané de différents télégrammes
par des participants différents, le droit d'émettre est donné en
fonction d'une pré-programmation de niveaux de priorités des
participants. Quand le télégramme est lu par le destinataire, ce
dernier envoie immédiatement un accusé de réception. La durée totale
du télégramme, y compris la quittance, varie entre 20 et 40 ms.
Un télégramme formé de quelque octets contient les informations
suivantes :
|
contrôle
|
adresse source
|
adresse cible
|
routage
|
longueur
|
information
max 16 * 8 bits
|
sécurité
|
|
8 bits
|
2 * 8 = 16
|
2 * 8 + 1 =17
|
3
|
4
|
n * 8
|
8
|
Le débit binaire est de 9600 bits/s, c'est-à-dire 104
microsecondes
par bit. La longueur du télégramme varie entre 8 et 23
mots. Un mot comprend 8
bits auxquels on ajoute 3 bits et une pause d'une durée de 2 bits,
soit une durée de transmission de 1,35 ms par mot de 13 bits (et non
de 8 bits).
|
|
|