|
.

|
moteurs triphasés asynchrones |
| Construction :
Fonctionnement électrique:
Les bobines - alimentées en alternatif triphasé - produisent chacune un flux
magnétique dont la résultante est un champ magnétique tournant (voir  ou ou  sur le champ tournant). Ce
flux coupe les conducteurs du rotor et y induit un courant qui lui-même engendrera un flux magnétique induit. Un effet
dynamique se crée entre les deux flux et entraîne la mise en rotation du rotor. Ce type
de moteur peut donc démarrer seul. sur le champ tournant). Ce
flux coupe les conducteurs du rotor et y induit un courant qui lui-même engendrera un flux magnétique induit. Un effet
dynamique se crée entre les deux flux et entraîne la mise en rotation du rotor. Ce type
de moteur peut donc démarrer seul.
Le rotor ne peut jamais atteindre la vitesse synchrone (vitesse de rotation du champs
tournant) car il n'y aurait plus de variation de flux dans les conducteurs rotoriques.
voir aussi : courant de démarrage, moteurs à bagues, la plaquette. |
|
moteurs triphasés synchrones |
| Construction : moteur à rotor à aimant permanent (
petite puissance) ou à rotor bobiné, sur l'axe du rotor bobiné, présence de 2
collecteurs. |
Voir tourner le moteur synchrone :
|
Caractéristique mécanique:
- vitesse de rotation égale ou sous multiple entier de la vitesse du champ
tournant;
- plus le nombre de paire de pôles est important, plus la vitesse diminue;
- plus le nombre de paire de pôles est important, plus le pas polaire est petit;
- minimum 5 bornes pour un rotor bobiné
exemple pour un moteur alimenté à 50 Hz
| nombre de paire de pôles |
1 |
2 |
3 |
5 |
10 |
| pas polaire en degré |
180 |
90 |
60 |
33 |
18 |
| vitesse du champ tournant en s-1 |
50 |
25 |
16.6 |
10 |
5 |
| vitesse du rotor en tours/minute 50 |
3000 |
1500 |
1000 |
600 |
300 |
Caractéristique électrique:
Alimentation du stator en triphasé alternatif;
alimentation du rotor en courant continu; (peut être pris d'une dynamo en bout d'arbre);
machine réversible en alternateur synchrone.
récepteur capacitif lorsqu'on surexcite le rotor.
Fonctionnement:
Lorsqu'elles sont alimentées, les bobines réparties sur la périphérie du moteur (le
stator) engendrent des flux
magnétiques variables en intensité et en sens. La résultante des flux s'appelle le champ tournant
(voir ou sur le champ tournant).
Cette résultant tourne à une vitesse dépendant de la fréquence du réseau et du nombre
de paires de pôles (paires de bobines statoriques) selon la relation :
n = f / p [s-1] = [s-1]
/[-]
Lorsqu'on alimente l(es) ' enroulement (s) du rotor en courant
continu (par le deux collecteurs), la polarité magnétique ne change pas par rapport à
l'arbre du moteur. Ces pôles magnétiques vont "crocher" sur les pôles du
champ tournant - donc avoir exactement la même vitesse de rotation - et entraîner avec
lui le rotor. En cas de surcharge mécanique, le rotor ne pourra plus tourner à sa
vitesse nominal et "décrochera" (il s'arrêtera).
Le moteur synchrone ne tournant qu'à la vitesse du champ tournant,
n'a pas une accélération suffisamment élevée et doit par conséquence être amené à
une vitesse proche de sa vitesse nominal par un moyen auxiliaire (moteur auxiliaire,
fonctionnement en asynchrone au démarrage, rémanence du rotor + dynamo en bout d'arbre,
entraînement mécanique).
exemples d'utilisation: (avec des commandes à onduleurs à
thyristor- pour des puissances > 1000 kW)
T.G.V. Atlantique , propulsion de gros navire, malaxeur (industrie chimique), circulateur
(centrale nucléaire)
Le moteur synchrone sert é transformer de l'énergie électrique
en énergie mécanique.
L'alternateur synchrone sert à
transformer de l'énergie mécanique en énergie électrique.
|
|
Moteurs
triphasé à plusieurs vitesses |
Les moteurs à plusieurs vitesses peuvent être réparti en
deux groupes:
- moteur à plusieurs enroulements - ces moteurs ont plusieurs stators pour un seul
rotor (le nombre de paire de pôles est différent pour chaque stator).
- moteur à demi-bobines (PAM ou Dalhander)
Ce dernier est caractérisé par un rapport de deux de ses vitesses - selon le couplage
que l'on fait (triangle série pour la petite vitesse ou étoile parallèle pour la
grande) on double le nombre de paire de pôles du stator, variant ainsi la vitesse de son champ tournant.On peut avoir 4/2 pôles
, 8/4 pôles ou 16/8 pôles. Dans le cas d'un 8/4 pôles, il y a 6 bobines. Pour la petite
vitesse elles sont couplées par 2 en série, ce qui donne 3 groupes de 2 bobines en
série, qui sont ensuite couplés en triangle, ce qui donne 8p.
Pour la grande vitesse les bobines sont couplées par 2 en parallèle, les 3 groupes de
deux en parallèle, sont coplé ensuite en étoile pour obtenir le 4 pôles. Ces
moteurs n'ont en générale qu'une seule tension , soit 230 Volts ou le plus souvent
400Volts 50 Hz.
En standart on obtient la PV en branchant le réseau sur les bornes 1U, 1V,
1W, les 3 autres bornes 2U, 2V, 2W, restant libre, ce qui donne le triangle série. Pour
la GV on court-cicuite les bornes 1U, 1V et 1W et on raccorde le réseau aux bornes
2U,2V,2W, ce qui donne l'étoile parallèle.
En version habituelle, un 8/4 pôles délivre pour un couple relatif de 100% en PV, un
couple de 75 % en GV, et pour une puissance relative de 100 % en PV, une puissanc de 150%
en GV.
note : On peut également faire varier la vitesse de rotation d'un moteur triphasé
en utilisant un convertisseur de fréquences.
|
|
Frein des moteurs triphasé |
Frein à contre-courant:
Le frein à contre-courant est simplement l'alimentation du stator en croisant 2 fils
d'alimentation. Ceci change le sens du champ
tournant (voir ou sur le champ tournant), induisant des courants de sens
contraire dans le stator et donc une force induite de sens opposé au sens de rotation
actuel. Le moteur est donc freiné.
Attention, si on laisse l'alimentation du frein après l'arrêt du moteur, ce dernier va
redémarrer en sens inverse.
Frein à courant continu
Dans ce cas de freinage, il faut une source de tension continue. Après déconnexion de
l'alimentation, le stator est alimenté avec le courant continu ( un pôle sur un
enroulement U1et l'autre sur les deux autres V1 et W1) Il produit un champ magnétique
fixe dans le moteur. Les conducteurs du rotor coupe les lignes de force magnétique. Une
force induite prend naissance sur le rotor; son sens et tel qu'elle s'oppose à tout
déplacement du rotor. Ce dernier est donc ralenti, puis bloqué dans sa position
d'arrêt.
|
|
limitation
du courant de démarrage |
les 3 manières de diminuer le courant de démarrage :
- un démarrage étoile-triangle (si le moteur se raccorde normalement
en triangle sur votre réseau);
- le constructeur peut construire un moteur à cage avec une forme
d'encoche particulière ou en différent matériaux
dans le cas de la double cage, la barre extérieure est en laiton (en
gris) et celle de l'intérieure en cuivre. Au démarrage "seule" la barre
extérieure ou la partie haute de la barre profonde. Ces parties présentent une grande
réactance d'induction au démarrage et limitent ainsi le courant au stator. Une fois le
moteur lancé, les deux barres respectivement la barre complète conduisent . Le courant
du rotor augmente.
|
 cette image m'a généreusement été offerte par Sitelec |
- il peut également bobiner le rotor ce qui permettra d'y raccorder
(par l'intermédiaire des bagues) des résistances de démarrage - en limitant le courant
du rotor, on diminue aussi le courant du stator. voir ci-dessous:
Moteur triphasé à bagues:
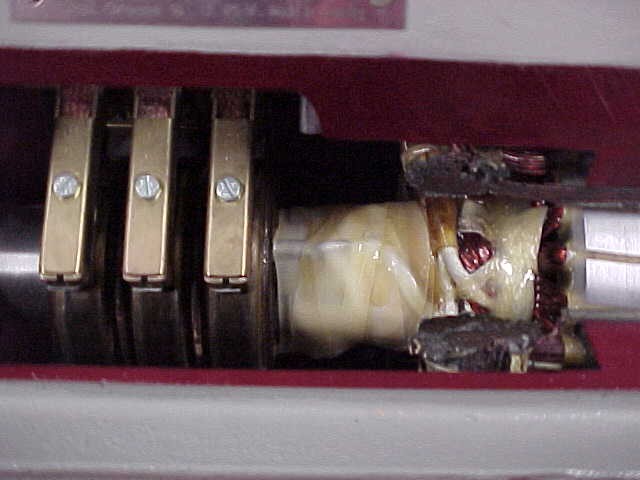 |
Le moteur triphasé à bague est utilisé
généralement lorsque l'on a besoin de limiter le courant de démarrage. son symbole :

Le stator est un stator tout à fait identique au staor des machines tournantes
triphasées (synchrone ou asynchrone).
Le rotor présente (voir photos co-contre la particularité d'être bobiné. ( il est
impossible d'avoir un moteur à bague à cqage d'écureuil) Les bobines du rotor sont
racoodées aux 3 bagues représentées sur les photos.
la liaison entre les bagues du rotor et le stator se fait par des charbon. |
 |
 |
Le raccordement du moteur à bagues se fait normalement pour
le stator ( 6 bornes + 1 borne pour le conducteur PE) . Désignation U1, V1, W1 et U2, V2,
W2. sur un réseau 230/400V
- couplage étoile si moteur noté 230 / 400 V
- couplage triangle si moteur noté 400 / 690 V
Pour le rotor on utilise les 3 bornes de gauche (L, M, N ) qui sont utiles pour
brancher des résistances de démarrage. Ces dernières se placent en série sur le rotor
diminuant ainsi le courant rotorique au démarrage et donc aussi le courant statorique.
Lorsque le vitesse de rotation augmente on diminue graduellement la valeur des
résistances branchées en série sur le rotor jusqu'à faire un court-circuit du
rotor qui fonctionne alors comme un cage d'écureuil. Il existe des système avec contacts
centrifuges pour le réglage des valeurs de résistance au démarrage. (Ces moteurs se
reconnaissent aux petits cliquetis qu'ils font lorsqu'on fait tourner manuellement le
rotor).
Actuellement ce moteur est en voie de disparition du à son coût plus élevé à
l'achat et à l'entretien qu'un moteur à cage. On lui préfère des moteur traditionnel
pourvu d'une électronique de commande (démarreur électronique). |
|
|
moteurs
triphasés alimentés en monophasé |
1ère méthode un condensateur :
Les moteurs de petites puissances (moins
de 1kW) peuvent être alimentés en monophasé si l'on raccorde un condensateur entre l'un des conducteurs
et la borne libre du bornier d'alimentation.
L'inversion du sens de rotation s'obtient en raccordant le condensateur soit sur un pôle
d'alimentation soit sur l'autre( soit en W1 et V1, soit entre W1 et U1)Le couplage - étoile
ou triangle - est à choisir en
fonction de la plaquette du fabriquant.
note : la puissance en monophasée n'est que de 60% de celle en
triphasé. |
 |
Le choix du condensateur est quelque chose qui présente une grande
difficulté. Un professionnel devra faire plusieurs essais pour déterminer la capacité
du condensateur selon le fonctionnement du moteur. Le quidam pourra prendre comme
référence une valeur (approximative) de 8,2 microfarad par 100W de puissance avec une
tension d'alimentation de 230 V. Cette valeur doit être divisée par 3 si la tension est
de 400 V. Si le couple n'est pas suffisent, on procède à des essais avec des capacités
plus importantes.
Attention, il ne faut pas confondre ce moteur avec un moteur monophasé à deux enroulements qui fonctionne aussi avec un condensateur.
2ème méthode "machine équilibrage des phases" ou "moteur pilote
:
 Cette méthode convient pour 1 ou
plusieurs moteurs utiles (car il en faut un supplémentaire qui joue le rôle de pilote). Cette méthode convient pour 1 ou
plusieurs moteurs utiles (car il en faut un supplémentaire qui joue le rôle de pilote).
D'ABORD: démarrer le moteur pilote qui démarre comme un moteur diphasé grâce
au condensateur (que l'on peut aussi remplacer par une inductance) créant ainsi un
courant décalé de 90 degrés .
PUIS : une fois le rotor du pilote en rotation (à vide), il faut couper le
condensateur ce qui nous donne le potentiel d'une troisième phase (artificielle) qui peut
servir à l'alimentation d'un ou plusieurs autres moteurs triphasés.
PAR LA SUITE : il faut en permanence au moins un moteur (pas obligatoirement le pilote)
en marche pour maintenir le système en fonction.
La puissance du moteur pilote doit au moins être égale à celle du plus puissant des
moteurs dont il doit assurer le démarrage.
|
|
Le plaquette des moteurs tri |
| La plaquette du moteur doit comporter les indications
suivantes:
- Puissance mécanique
- tensions et couplage : par exemple 230/ 400 D/Y ou 400/690 D/Y
- courant de ligne pour chacun des couplages
- cos phi pour chacun des couplages
- vitesse de rotation.en tours par minute
Les autres grandeurs S, Q, rendement, courant et tension de phase se calcul à partir
de ces éléments.
|
|
moteur ionique |
| Le moteur ionique fonctionne en faisant transiter un
plasma (gaz ionisé très chaud - 10 millions de degrés ) à travers un tube fini en
tuyère. L'ionisation du gaz - de l'hydrogène - permet de séparer les électrons des
ions. Ceux-ci sont ensuite propulsés à des vitesses entre 50 et 300 km/s. Des champs
magnétiques sont utilisés pour canaliser le plasma dans le moteur et à la sortie pour
contrôler la vitesse d'éjection.
Pour chauffer le plasma il faut environs 10 MW par moteur. Cette puissance peut être
fournie par un réacteur nucléaire à l'uranium.
L'utilisation d'un tel moteur est a réserver pour des vols interplanétaires
|
|
|